The “smart” chassis and what’s behind it
It has been more than 30 years since the fully active suspension was used for the first time in Formula 1, which was used with great success by the Williams-Renault team – and which was then banned there. However, it is still possible to use it on the road and manufacturers often use it – more and more.
In this article, we will categorize the current systems and highlight the main differences compared to a traditional chassis.
Definition, basic types
Active suspension is a type of automotive suspension on the vehicle. It uses an on-board system to control the vertical movement of the vehicle’s wheels relative to the chassis or vehicle body, rather than the passive suspension provided by large springs where the movement is entirely determined by the road surface.
Active suspensions fall into two classes: true active suspensions and adaptive or semi-active suspensions. While semi-adaptive suspensions only change the damper firmness to match changing road or dynamic conditions, active suspensions use some type of actuator to raise and lower the chassis individually at each wheel.
These technologies allow automakers to achieve better ride quality and car handling by keeping the tires perpendicular to the road during cornering, allowing for better grip and control.
An on-board computer detects the movement of the body from sensors in the vehicle and uses this data to control the operation of the active and semi-active suspensions. The system virtually eliminates body roll and roll angle fluctuations in many driving situations, including cornering, acceleration and braking.
Operation
According to the skyhook theory, the ideal suspension allows the vehicle to maintain a stable posture as if it were suspended in the sky by an imaginary hook, unaffected by road conditions at any level.

Figure 1 (source: www.wikipedia.org)
Since an actual skyhook is obviously impractical to solve the present problem, true active suspension systems rely on actuators. The imaginary line (zero vertical acceleration) is calculated based on the value provided by the acceleration sensor mounted on the vehicle body (see Figure 3). The dynamic elements only consist of the linear spring and the linear shock absorber; therefore, there is no need for complicated calculations.
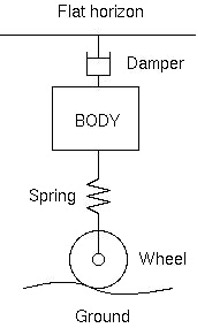
Figure 2 (source: www.wikipedia.org)
The vehicle contacts the ground through the spring and shock absorber in a normal spring-damper suspension as shown in Figure 1. To achieve the same level of stability as the skyhook theory, the vehicle must be in contact with the ground through the spring and through the imaginary line, in that case if damping coefficient reaches infinity, the vehicle will be in a state where it is completely fixed to the imaginary line, so the vehicle does not shake.
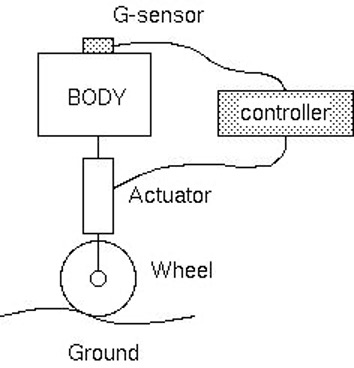
Figure 3 (source: www.wikipedia.org)
Active landing gear
The first to be introduced active suspensions use separate actuators that can apply independent force to the suspension to improve ride characteristics. Disadvantages of this design are high costs, complexity and weight of the equipment and the need for frequent maintenance in some implementations. Maintenance may require special tools and some problems may be difficult to diagnose.
Hydraulic landing gears
Hydraulically operated suspensions are controlled by using hydraulics. The first example appeared in 1954 with hydropneumatic suspension developed by Paul Magès at Citroën. The hydraulic pressure is provided by a high-pressure radial piston hydraulic pump. The sensors constantly monitor the movement of the bodywork and the vehicle’s driving level and continuously supply the hydraulic height correctors with new data. In a few milliseconds, the suspension generates counterforces to raise or lower the body.
In practice, the system always included the desirable self-leveling suspension and adjustable height suspension, the latter tied to vehicle speed for better aerodynamic performance as the vehicle descends at high speed.
Millions of production vehicles have been built with variations of this system.
Electrohydraulic operation
The sensors constantly monitor the movement of the body and the driving level of the vehicle and continuously supply the computer with new data. As the computer receives and processes data, it operates hydraulic servos mounted next to each wheel. The servo-controlled suspension provides almost instant counterforce to body roll, dip and crouch during driving maneuvers.
Computer Active Technology Suspension (CATS) fine-tunes the best possible balance between ride quality and handling by analyzing road conditions and makes up to 3,000 adjustments per second to suspension settings via electronically controlled shock absorbers.
Following its F1 debut, the 1999 Mercedes-Benz CL-Class (C215) introduced Active Body Control, where high-pressure hydraulic servos are controlled by electronic computing, and this feature is still available. Vehicles can be designed to actively lean when cornering to improve passenger comfort.
Electromagnetic recuperative systems
In fully active, electronically controlled production cars, electric servos and motors linked to electronic computing enable flat cornering and instant reactions to road conditions.
Electromagnetic active suspension uses linear electromagnetic motors for each wheel. It provides an extremely fast response and allows the regeneration of consumed power by using the motors as generators. This almost overcomes the problems of slow response time and high energy consumption of hydraulic systems.
Adaptive and semi-active systems
Adaptive or semi-active systems can only change the viscous damping coefficient of the shock absorber and do not add energy to the suspension system. While adaptive suspensions typically have a slow time response and a limited number of damping coefficient values, semi-active suspensions have a time response of nearly a few milliseconds and provide a wide range of damping values.
Therefore, adaptive suspensions usually only suggest different driving modes (comfort, normal, sport…) corresponding to different damping coefficients, while semi-active suspensions modify the damping in real time, depending on road conditions and car dynamics.
Solenoid/valve operated
This type is the most economical and basic type of semi-active suspension. They consist of a solenoid valve that changes the flow of hydraulic fluid in the shock absorber, thereby changing the damping characteristics of the suspension. The solenoid valves are connected to the control computer which sends them commands depending on the control algorithm.
Magnetorheological damper
Another fairly new method involves magnetorheological shock absorbers which is called MagneRide. It was originally developed by Delphi Corporation for GM and – like many other new technologies – was standard equipment on the Cadillac STS (2002 model year) and some other GM models from 2003 onwards.
Shock absorber fluid contains metal particles. Through the on-board computer, the compliance characteristics of the shock absorbers are regulated by an electromagnet. Essentially, increasing the current flowing into the damper’s magnetic circuit increases the magnetic flux of the circuit. This changes the alignment of the metal particles which increases the viscosity of the fluid, thereby increasing the compression/rebound rate while the decrease softens the shock absorbers by aligning the particles in the opposite direction.












